


















 101
101

戴尔的胡比熊!它使用旋转的泡沫油漆辊将对手提升到环上,然后将其推开。此外,它使用多普勒雷达来定位对手。
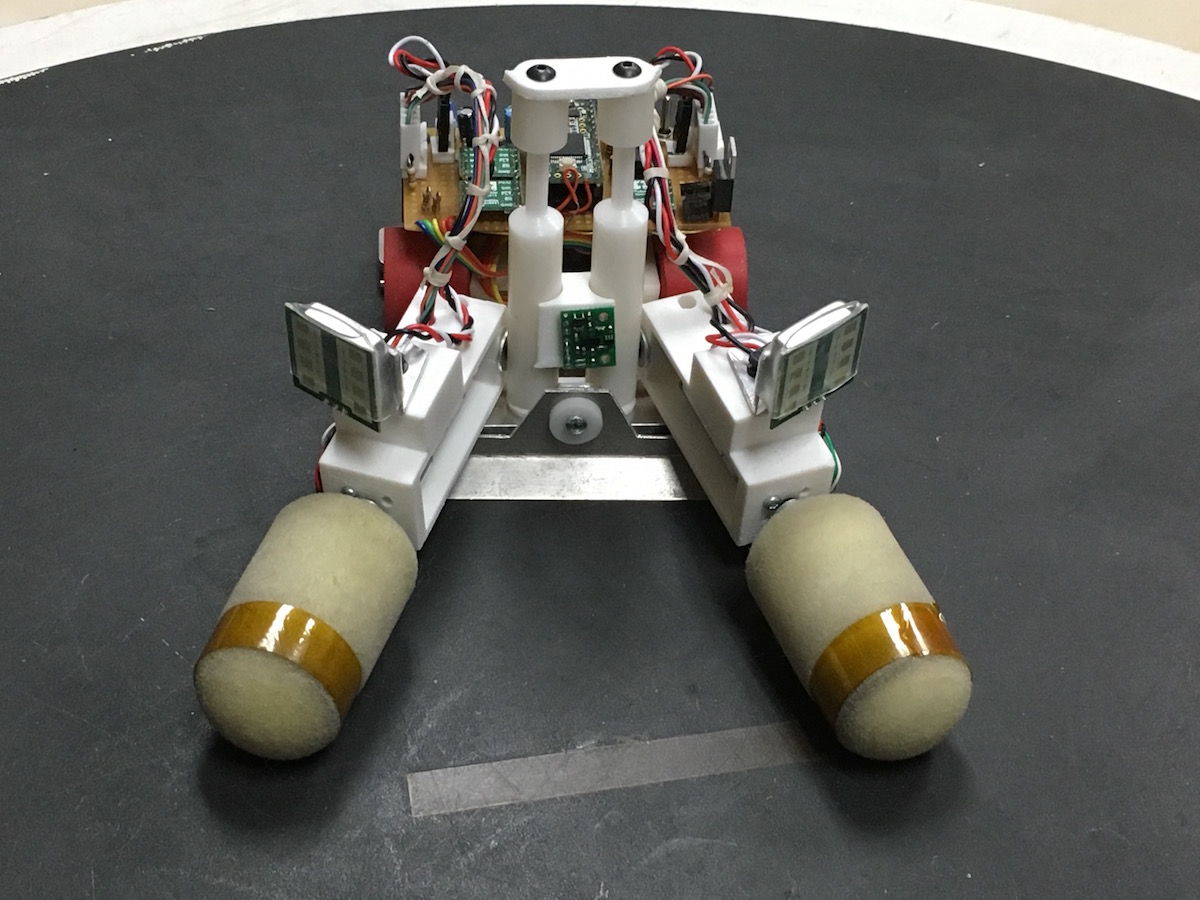
在启动时,迷你相机机器人必须适合10厘米以内,但高度无限制。开始后可能会扩大。下面是机器人的起始位置,辊子竖立在一起。在5秒启动延迟之后,辊子以140RPM开始旋转,并且逐渐地将它们从它们之间的小塑料保持器上卷起并且落到表面上。端部上的kapton胶带减少摩擦。
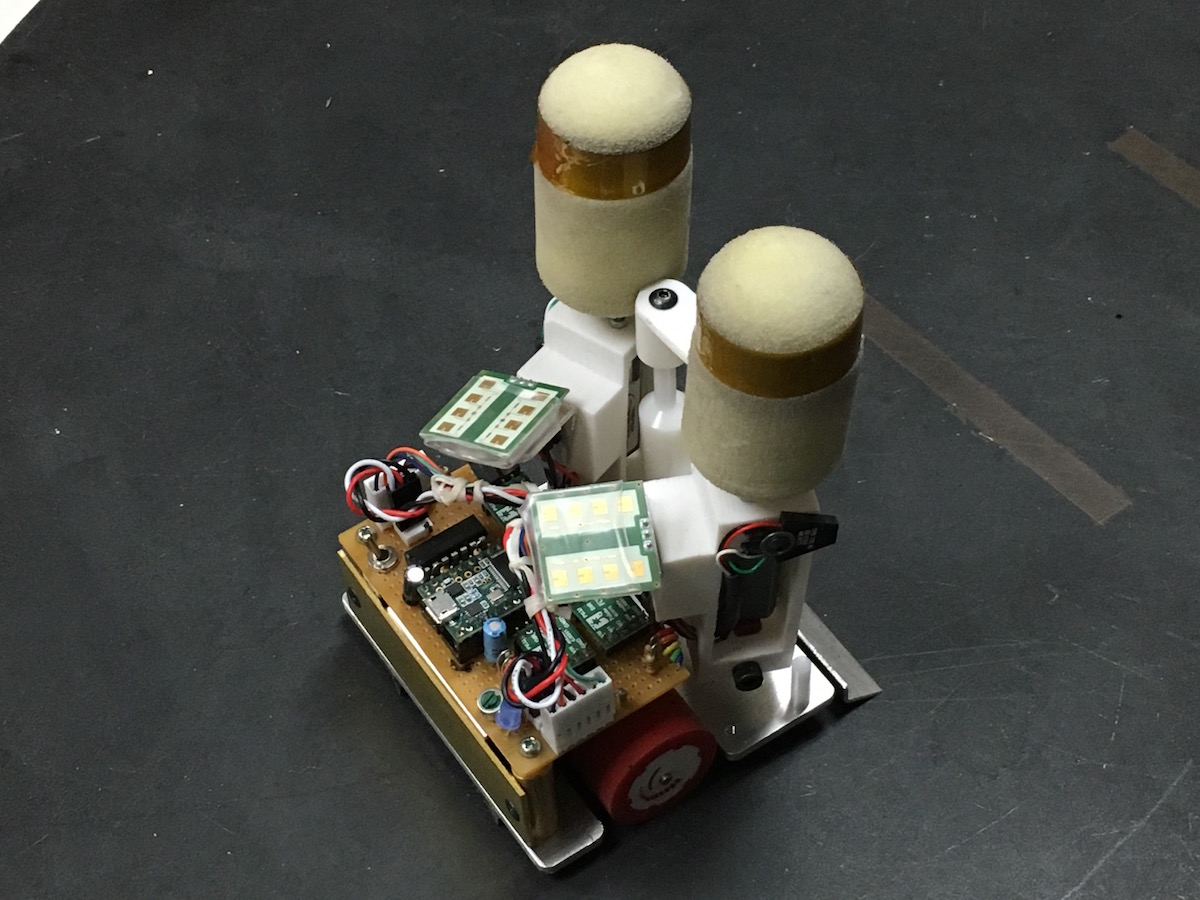
机器人大脑是一个Teensy 3.2。它有一个运行在96 mhz的32位ARM处理器。 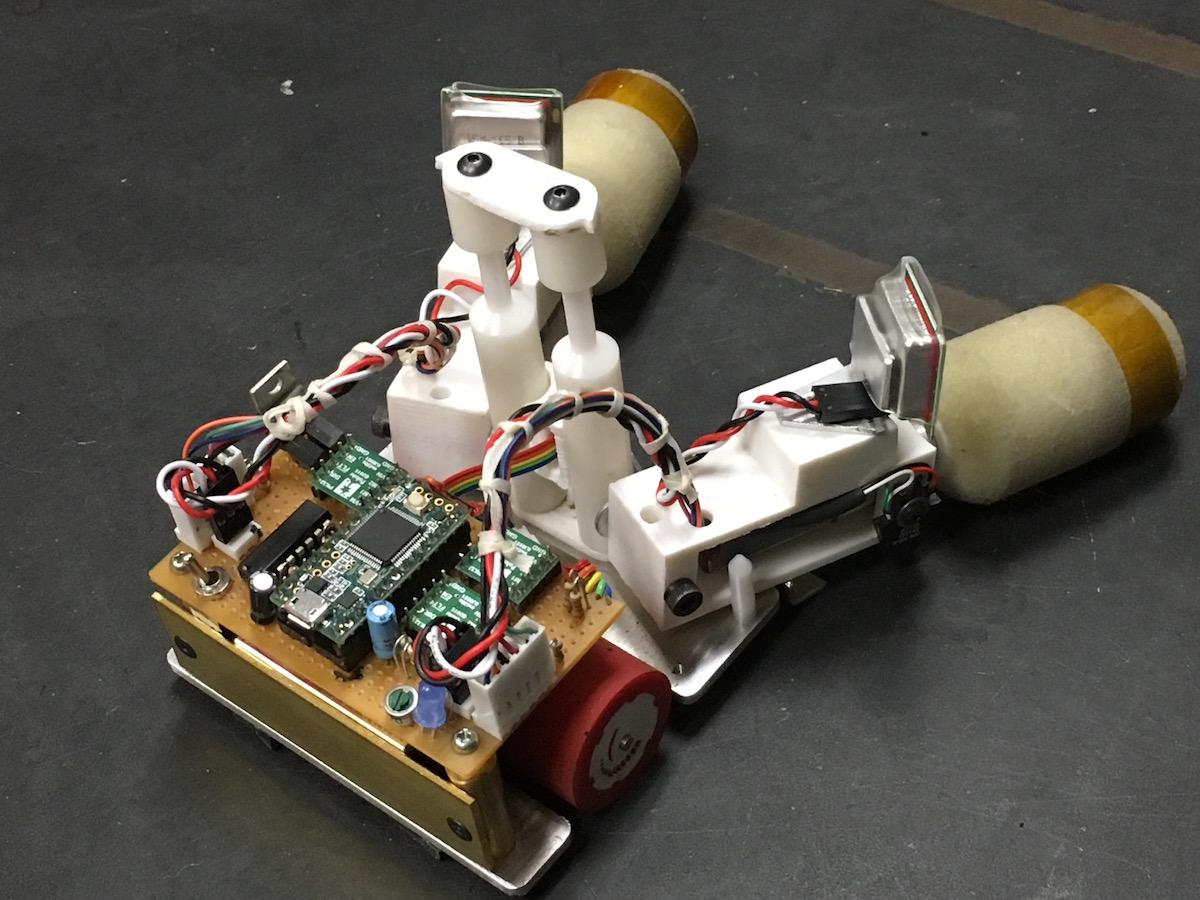
对手检测通过一对 安装在每个滚筒上方的24 gHz多普勒检测器雷达(RSM-1650)完成。雷达输出音频信号。频率 与目标的相对速度成比例,幅度取决于目标大小和距离。多普勒频率与速度的关系由该公式定义。
速度(英尺/秒)= .0204 *频率(Hz)
1英尺/秒= 49Hz
这些信号由一对运算放大器使电平达到一伏以上,所有其他滤波和处理在微处理器中进行数字化处理。由于雷达只响应相对运动,我添加了一个小型的VL53L0X光学距离传感器来指示对手在滚轮之间被捕获的时间。当这种情况发生时,它会对车轮施加全部的力量。
使用Pololu #2961 H桥模块, 使用锁定的反相PWM 控制电机。 整个事情由单个锂9伏电池供电。
那么这个奇怪的工具你有什么好处呢?油漆滚筒真的可以打楔块吗?我已经测试了对Delta Force,我的其他迷你相扑,是的,它赢得每一次。我将在2016年11月19日在AHRC机器人大会上对其他对手进行测试。
观看下面的240 fps slo-mo视频。
https://v.youku.com/v_show/id_XMzAwNzYxOTY1Mg==.ht...
Huggy Bear与Delta Force在正常速度下
https://v.youku.com/v_show/id_XMzAwNzYxOTY1Ng==.ht...
Huggy Bear的YouTube视频在2016 AHRC机器人拉力赛上比赛

 下载ECAD模型
下载ECAD模型









