TA的每日心情 | 开心
2019-11-4 13:48 |
|---|
签到天数: 14 天 连续签到: 1 天 [LV.3]偶尔看看II
|
本帖最后由 geren2014 于 2019-11-7 16:32 编辑
 PCB3D视角 PCB3D视角

连续调压

过流保护

保护恢复
从最基本的说起吧,DC-DC的变换电路有很多种,线性电源、开关电源、电荷泵,线性电源大家比较熟悉的应该就是78XX系列的芯片了,电荷泵主要用在小电流的应用中,我们也不加讨论。主要讲讲开关电源,我呢也是一个先学先卖的人,就对照资料啥的随便介绍下拉,权当是开源本设计前的一点准备工作。
|
开关稳压器的工作原理,就是通过控制电路来控制开关器件的通断,配合负反馈完成稳压,跟线性稳压比起来,具有效率高体积小的特点,但是输出没有线性电源稳定。开关电源的基本结构有很多种,包括BUCK、BOOST、BUCK-BOOST、CUK等非隔离式的DCDC变换器,也有Flyback、LLC等隔离式的DCDC变换器。
开源的这个设计,是以buck拓扑为核心,配合F334的高级定时器的PWM、PI算法,实现的一个很简单的闭环控制,设计输入电压60V时,输出电压可调,输出电流最大5A,输出最大功率在200W左右。 |
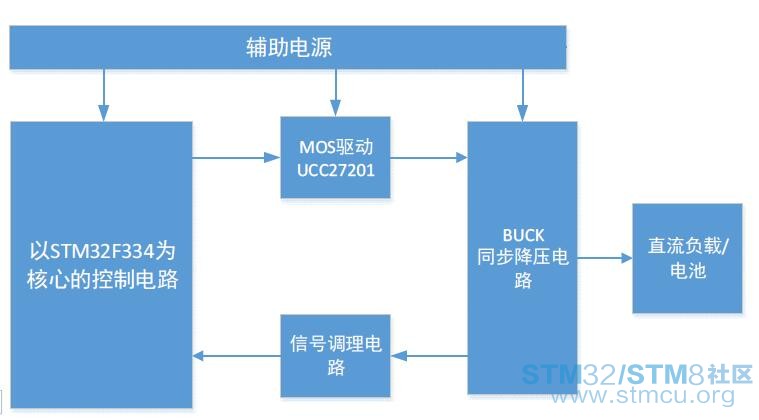
系统框图如上,首先说明我这款电压是从HP电源的基础上增加人机界面和改善栅极驱动做的,也是征得了原作者的同意,在此表示感谢,借这个机会分享下自己的心得。

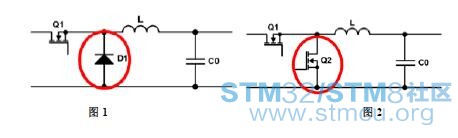
BUCK电路的基本结构如上图所示,相信大家基本或多或少对这个结构都有一定的了解。简单说下,S1闭合时,输入的通路为S1到L1到电容C2以及负载,S2关断时,L1中储存的能量经过D1形成新的回路,如此循环往复,在此过程中实现能量的转移,输出与输入电压的比值为占空比D。
同步BUCK,就是采用导通电阻特别低的mosfet来代替续流二极管,以此来提高整个拓扑的工作效率。基本图如下:
| 在有了以上了解的基础上,开始本设计的电路设计,亦即在同步buck的基本拓扑之上展开设计,最终设计如下: |
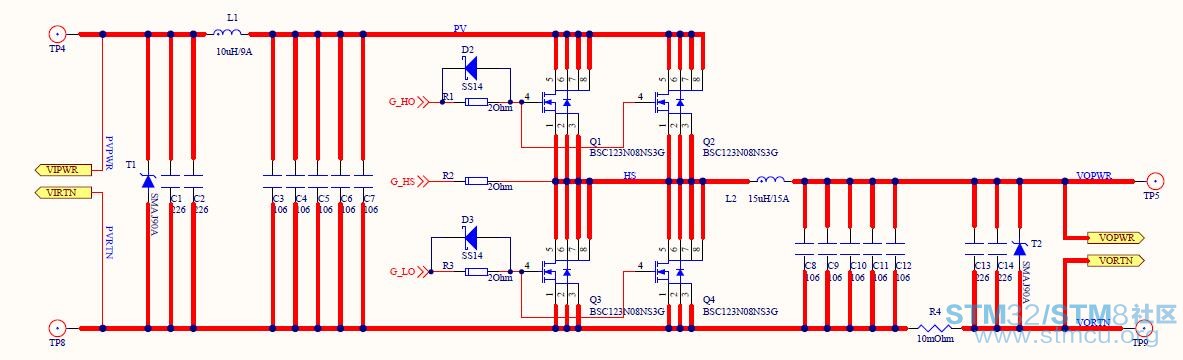
图中采用了无电解电容设计,这样虽然纹波可能会大一点,但是响应的体积却小了很多,实际测试中,纹波在100MV以下。电感和电容的取值有响应公式可以推到,这里不多赘述,直接给大家提供一个小工具,输入参数就可以计算出结果的小工具:
 BOOST电感、BUKC电感、逆变电容、电感计算表.rar (8.36 KB, 下载次数: 358) BOOST电感、BUKC电感、逆变电容、电感计算表.rar (8.36 KB, 下载次数: 358)
下面谈一谈程序的设计思路,因为这款设计为了尽可能减少体积,因此使用了较大频率的PWM波,取值为250k,所采用的主控stm32f334是意法半导体专为数控电源所设计的一款MCU。STM32F334xx微控制器具有高分辨率定时器(HRTIM)外设,可产生多达10个信号,能够处理用于控制、同步或保护的各种不同输入信号。其模块化架构允许对大部分转换拓扑和多并联转换器进行处理,并可在运行中重新配置它们。

在如上所示的拓扑当中,包括输出电压读数和过流保护(利用FAULT输入),使在电流超出可编程阈值时关闭转换器。为简单起见,此处不讨论电流传感器和调整电路;预期的FAULT反馈(在FLT1输入上)为数字信号(在PA12输入上)。
HRTIM工作于连续模式,PWM信号定义如下:
• TA1:在 TA Period 置位,在 TA CMP2 复位
• TA2:利用死区时间发生器,与 TA1 互补 (相同的上升沿和下降沿死区时间)
|

需要注意的是,有关AD采样的触发时机选择是一个很关键的点,如下图所示,对于特定占空比的PWM波,在其中央触发AD工作,这样可以避免纹波的影响。

由此,通过AD采样的输出电压与设定的电压一起,配合PI调节占空比,即完成了闭环反馈过程,通过对输出电压电流的编程,即完成电池充电程序的编写。
这里给出配置的代码和PI的代码。
- /***************************************************************************
- #define PWM_PERIOD = 144000000*32/switchfrequency
- #define DT_RISING = risingtime*switchfrequency*PWM_PERIOD
- #define DT_FALLING = fallingtime*switchfrequency*PWM_PERIOD
- ***************************************************************************/
- /**
- * @brief 用于配置HRTIM_A的输出,关闭deadtime时,为单输出,开启deadtime时,为双输出。
- * @param 死区使能,配套AD采样使能,错误使能,中断使能,初始频率,初始占空比(HO),中断频率,上升死区时间(单位纳秒),下降死区时间
- * @retval None
- */
- void MY_BSP_Init_HRTIM_A(BOOLEAN deadtime,BOOLEAN adenable,BOOLEAN faultenable,BOOLEAN interrupt,uint32_t Initial_Fre,uint8_t Initial_Duty,uint8_t n_ISR,uint8_t risingtime,uint8_t fallingtime)
- {
- HRTIM_TimeBaseCfgTypeDef timebase_config;
- HRTIM_TimerCfgTypeDef timer_config;
- HRTIM_OutputCfgTypeDef output_config_TA;
- HRTIM_CompareCfgTypeDef compare_config;
- /* ----------------------------*/
- /* HRTIM Global initialization */
- /* ----------------------------*/
- /* Initialize the hrtim structure (minimal configuration) */
- hhrtimA.Instance = HRTIM1;
- hhrtimA.Init.HRTIMInterruptResquests = HRTIM_IT_NONE;
- hhrtimA.Init.SyncOptions = HRTIM_SYNCOPTION_NONE;
- /* Initialize HRTIM */
- HAL_HRTIM_Init(&hhrtimA);
- /* HRTIM DLL calibration: periodic calibration, set period to 14祍 */
- HAL_HRTIM_DLLCalibrationStart(&hhrtimA, HRTIM_CALIBRATIONRATE_14);
- /* Wait calibration completion*/
- if (HAL_HRTIM_PollForDLLCalibration(&hhrtimA, 100) != HAL_OK)
- {
- Error_Handler(); // if DLL or clock is not correctly set
- }
- /* --------------------------------------------------- */
- /* TIMERA initialization: timer mode and PWM frequency */
- /* --------------------------------------------------- */
- timebase_config.Period = 4608000000/Initial_Fre; /* 400kHz switching frequency */
- timebase_config.RepetitionCounter = n_ISR - 1; /* n ISR every 128 PWM periods */
- timebase_config.PrescalerRatio = HRTIM_PRESCALERRATIO_MUL32;
- timebase_config.Mode = HRTIM_MODE_CONTINUOUS;
- HAL_HRTIM_TimeBaseConfig(&hhrtimA, HRTIM_TIMERINDEX_TIMER_A, &timebase_config);
- /* --------------------------------------------------------------------- */
- /* TIMERA global configuration: cnt reset, sync, update, fault, burst... */
- /* timer running in continuous mode, with deadtime enabled */
- /* --------------------------------------------------------------------- */
- timer_config.DMARequests = HRTIM_TIM_DMA_NONE;
- timer_config.DMASrcAddress = 0x0;
- timer_config.DMADstAddress = 0x0;
- timer_config.DMASize = 0x0;
- timer_config.HalfModeEnable = HRTIM_HALFMODE_DISABLED;
- timer_config.StartOnSync = HRTIM_SYNCSTART_DISABLED;
- timer_config.ResetOnSync = HRTIM_SYNCRESET_DISABLED;
- timer_config.DACSynchro = HRTIM_DACSYNC_NONE;
- timer_config.PreloadEnable = HRTIM_PRELOAD_ENABLED;
- timer_config.UpdateGating = HRTIM_UPDATEGATING_INDEPENDENT;
- timer_config.BurstMode = HRTIM_TIMERBURSTMODE_MAINTAINCLOCK;
- timer_config.RepetitionUpdate = HRTIM_UPDATEONREPETITION_ENABLED;
- timer_config.ResetUpdate = HRTIM_TIMUPDATEONRESET_DISABLED;
- if(interrupt == TRUE)
- {
- timer_config.InterruptRequests = HRTIM_TIM_IT_REP;
- }
- else
- timer_config.InterruptRequests = HRTIM_TIM_IT_NONE;
- timer_config.PushPull = HRTIM_TIMPUSHPULLMODE_DISABLED;
- if(faultenable == TRUE)
- timer_config.FaultEnable = HRTIM_TIMFAULTENABLE_FAULT1;
- else
- timer_config.FaultEnable = HRTIM_TIMFAULTENABLE_NONE;
- timer_config.FaultLock = HRTIM_TIMFAULTLOCK_READWRITE;
- timer_config.DeadTimeInsertion = HRTIM_TIMDEADTIMEINSERTION_ENABLED;
- timer_config.DelayedProtectionMode = HRTIM_TIMER_A_B_C_DELAYEDPROTECTION_DISABLED;
- timer_config.UpdateTrigger= HRTIM_TIMUPDATETRIGGER_NONE;
- timer_config.ResetTrigger = HRTIM_TIMRESETTRIGGER_NONE;
- HAL_HRTIM_WaveformTimerConfig(&hhrtimA, HRTIM_TIMERINDEX_TIMER_A, &timer_config);
- /* Set compare registers for duty cycle on TA1 */
- compare_config.CompareValue = 46080000*Initial_Duty/Initial_Fre; /*duty cycle */
- HAL_HRTIM_WaveformCompareConfig(&hhrtimA,
- HRTIM_TIMERINDEX_TIMER_A,
- HRTIM_COMPAREUNIT_1,
- &compare_config);
- /* --------------------------------- */
- /* TA1 and TA2 waveforms description */
- /* --------------------------------- */
- output_config_TA.Polarity = HRTIM_OUTPUTPOLARITY_HIGH;
- output_config_TA.SetSource = HRTIM_OUTPUTSET_TIMPER;
- output_config_TA.ResetSource = HRTIM_OUTPUTRESET_TIMCMP1;
- output_config_TA.IdleMode = HRTIM_OUTPUTIDLEMODE_NONE;
- output_config_TA.IdleLevel = HRTIM_OUTPUTIDLELEVEL_INACTIVE;
- output_config_TA.FaultLevel = HRTIM_OUTPUTFAULTLEVEL_INACTIVE;
- output_config_TA.ChopperModeEnable = HRTIM_OUTPUTCHOPPERMODE_DISABLED;
- output_config_TA.BurstModeEntryDelayed = HRTIM_OUTPUTBURSTMODEENTRY_REGULAR;
- HAL_HRTIM_WaveformOutputConfig(&hhrtimA,
- HRTIM_TIMERINDEX_TIMER_A,
- HRTIM_OUTPUT_TA1,
- &output_config_TA);
- if(deadtime == TRUE)
- {
- HAL_HRTIM_WaveformOutputConfig(&hhrtimA,
- HRTIM_TIMERINDEX_TIMER_A,
- HRTIM_OUTPUT_TA2,
- &output_config_TA);
- }
- if(deadtime == TRUE)
- {
- HRTIM_DeadTimeCfgTypeDef HRTIM_TIM_DeadTimeConfig;
- /* Deadtime configuration for Timer A */
- HRTIM_TIM_DeadTimeConfig.FallingLock = HRTIM_TIMDEADTIME_FALLINGLOCK_WRITE;
- HRTIM_TIM_DeadTimeConfig.FallingSign = HRTIM_TIMDEADTIME_FALLINGSIGN_POSITIVE;
- HRTIM_TIM_DeadTimeConfig.FallingSignLock = HRTIM_TIMDEADTIME_FALLINGSIGNLOCK_READONLY;
- HRTIM_TIM_DeadTimeConfig.FallingValue = risingtime*4096/1000;
- HRTIM_TIM_DeadTimeConfig.Prescaler = HRTIM_TIMDEADTIME_PRESCALERRATIO_MUL8;
- HRTIM_TIM_DeadTimeConfig.RisingLock = HRTIM_TIMDEADTIME_RISINGLOCK_WRITE;
- HRTIM_TIM_DeadTimeConfig.RisingSign = HRTIM_TIMDEADTIME_RISINGSIGN_POSITIVE;
- HRTIM_TIM_DeadTimeConfig.RisingSignLock = HRTIM_TIMDEADTIME_RISINGSIGNLOCK_READONLY;
- HRTIM_TIM_DeadTimeConfig.RisingValue = fallingtime*4096/1000;
- HAL_HRTIM_DeadTimeConfig(&hhrtimA, HRTIM_TIMERINDEX_TIMER_A, &HRTIM_TIM_DeadTimeConfig);
- }
- if(adenable == TRUE)
- {
- HRTIM_ADCTriggerCfgTypeDef adc_trigger_config;
- /* ------------------------------------------- */
- /* ADC trigger intialization (with CMP4 event) */
- /* ------------------------------------------- */
- compare_config.AutoDelayedMode = HRTIM_AUTODELAYEDMODE_REGULAR;
- compare_config.AutoDelayedTimeout = 0;
- if(Initial_Duty >=50)
- compare_config.CompareValue = 46080000*Initial_Duty/Initial_Fre; /* Samples in middle of ON time */
- else
- compare_config.CompareValue = 23040000*(100+Initial_Duty)/Initial_Fre;
- HAL_HRTIM_WaveformCompareConfig(&hhrtimA,
- HRTIM_TIMERINDEX_TIMER_A,
- HRTIM_COMPAREUNIT_4,
- &compare_config);
- adc_trigger_config.Trigger = HRTIM_ADCTRIGGEREVENT24_TIMERA_CMP4;
- adc_trigger_config.UpdateSource = HRTIM_ADCTRIGGERUPDATE_TIMER_A;
- HAL_HRTIM_ADCTriggerConfig(&hhrtimA,
- HRTIM_ADCTRIGGER_2,
- &adc_trigger_config);
- }
- if(faultenable == TRUE)
- {
- HRTIM_FaultCfgTypeDef fault_config;
- /* ---------------------*/
- /* FAULT initialization */
- /* ---------------------*/
- fault_config.Filter = HRTIM_FAULTFILTER_NONE;
- fault_config.Lock = HRTIM_FAULTLOCK_READWRITE;
- fault_config.Polarity = HRTIM_FAULTPOLARITY_LOW;
- fault_config.Source = HRTIM_FAULTSOURCE_DIGITALINPUT;
- HAL_HRTIM_FaultConfig(&hhrtimA,
- HRTIM_FAULT_1,
- &fault_config);
- HAL_HRTIM_FaultModeCtl(&hhrtimA,
- HRTIM_FAULT_1,
- HRTIM_FAULTMODECTL_ENABLED);
- }
- if(deadtime == TRUE)
- {
- /* ---------------*/
- /* HRTIM start-up */
- /* ---------------*/
- /* Enable HRTIM's outputs TA1 and TA2 */
- /* Note: it is necessary to enable also GPIOs to have outputs functional */
- /* This must be done after HRTIM initialization */
- HAL_HRTIM_WaveformOutputStart(&hhrtimA, HRTIM_OUTPUT_TA1 | HRTIM_OUTPUT_TA2);
- }
- else
- HAL_HRTIM_WaveformOutputStart(&hhrtimA, HRTIM_OUTPUT_TA1);
- /* Start both HRTIM TIMER A, B and D */
- if(interrupt == TRUE)
- HAL_HRTIM_WaveformCounterStart_IT(&hhrtimA, HRTIM_TIMERID_TIMER_A);
- else
- HAL_HRTIM_WaveformCounterStart(&hhrtimA, HRTIM_TIMERID_TIMER_A);
- GPIO_InitTypeDef GPIO_InitStruct;
- /* Enable GPIOA clock for timer A outputs */
- __HAL_RCC_GPIOA_CLK_ENABLE();
- /* Configure HRTIM output: TA1 (PA8) */
- GPIO_InitStruct.Pin = GPIO_PIN_8;
- GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
- GPIO_InitStruct.Pull = GPIO_NOPULL;;
- GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;;
- GPIO_InitStruct.Alternate = GPIO_AF13_HRTIM1;
- HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
- if(deadtime == TRUE)
- {
- /* Configure HRTIM output: TA2 (PA9) */
- GPIO_InitStruct.Pin = GPIO_PIN_9;
- HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
- }
- }
[color=rgb(51, 102, 153) !important]复制代码
[color=rgb(51, 102, 153) !important]
[color=rgb(51, 102, 153) !important]- /***************************************************************************
- #define PWM_PERIOD = 144000000*32/switchfrequency
- #define DT_RISING = risingtime*switchfrequency*PWM_PERIOD
- #define DT_FALLING = fallingtime*switchfrequency*PWM_PERIOD
- ***************************************************************************/
- /**
- * @brief 用于配置HRTIM_A的输出,关闭deadtime时,为单输出,开启deadtime时,为双输出。
- * @param 死区使能,配套AD采样使能,错误使能,中断使能,初始频率,初始占空比(HO),中断频率,上升死区时间(单位纳秒),下降死区时间
- * @retval None
- */
- void MY_BSP_Init_HRTIM_A(BOOLEAN deadtime,BOOLEAN adenable,BOOLEAN faultenable,BOOLEAN interrupt,uint32_t Initial_Fre,uint8_t Initial_Duty,uint8_t n_ISR,uint8_t risingtime,uint8_t fallingtime)
- {
- HRTIM_TimeBaseCfgTypeDef timebase_config;
- HRTIM_TimerCfgTypeDef timer_config;
- HRTIM_OutputCfgTypeDef output_config_TA;
- HRTIM_CompareCfgTypeDef compare_config;
- /* ----------------------------*/
- /* HRTIM Global initialization */
- /* ----------------------------*/
- /* Initialize the hrtim structure (minimal configuration) */
- hhrtimA.Instance = HRTIM1;
- hhrtimA.Init.HRTIMInterruptResquests = HRTIM_IT_NONE;
- hhrtimA.Init.SyncOptions = HRTIM_SYNCOPTION_NONE;
- /* Initialize HRTIM */
- HAL_HRTIM_Init(&hhrtimA);
- /* HRTIM DLL calibration: periodic calibration, set period to 14祍 */
- HAL_HRTIM_DLLCalibrationStart(&hhrtimA, HRTIM_CALIBRATIONRATE_14);
- /* Wait calibration completion*/
- if (HAL_HRTIM_PollForDLLCalibration(&hhrtimA, 100) != HAL_OK)
- {
- Error_Handler(); // if DLL or clock is not correctly set
- }
- /* --------------------------------------------------- */
- /* TIMERA initialization: timer mode and PWM frequency */
- /* --------------------------------------------------- */
- timebase_config.Period = 4608000000/Initial_Fre; /* 400kHz switching frequency */
- timebase_config.RepetitionCounter = n_ISR - 1; /* n ISR every 128 PWM periods */
- timebase_config.PrescalerRatio = HRTIM_PRESCALERRATIO_MUL32;
- timebase_config.Mode = HRTIM_MODE_CONTINUOUS;
- HAL_HRTIM_TimeBaseConfig(&hhrtimA, HRTIM_TIMERINDEX_TIMER_A, &timebase_config);
- /* --------------------------------------------------------------------- */
- /* TIMERA global configuration: cnt reset, sync, update, fault, burst... */
- /* timer running in continuous mode, with deadtime enabled */
- /* --------------------------------------------------------------------- */
- timer_config.DMARequests = HRTIM_TIM_DMA_NONE;
- timer_config.DMASrcAddress = 0x0;
- timer_config.DMADstAddress = 0x0;
- timer_config.DMASize = 0x0;
- timer_config.HalfModeEnable = HRTIM_HALFMODE_DISABLED;
- timer_config.StartOnSync = HRTIM_SYNCSTART_DISABLED;
- timer_config.ResetOnSync = HRTIM_SYNCRESET_DISABLED;
- timer_config.DACSynchro = HRTIM_DACSYNC_NONE;
- timer_config.PreloadEnable = HRTIM_PRELOAD_ENABLED;
- timer_config.UpdateGating = HRTIM_UPDATEGATING_INDEPENDENT;
- timer_config.BurstMode = HRTIM_TIMERBURSTMODE_MAINTAINCLOCK;
- timer_config.RepetitionUpdate = HRTIM_UPDATEONREPETITION_ENABLED;
- timer_config.ResetUpdate = HRTIM_TIMUPDATEONRESET_DISABLED;
- if(interrupt == TRUE)
- {
- timer_config.InterruptRequests = HRTIM_TIM_IT_REP;
- }
- else
- timer_config.InterruptRequests = HRTIM_TIM_IT_NONE;
- timer_config.PushPull = HRTIM_TIMPUSHPULLMODE_DISABLED;
- if(faultenable == TRUE)
- timer_config.FaultEnable = HRTIM_TIMFAULTENABLE_FAULT1;
- else
- timer_config.FaultEnable = HRTIM_TIMFAULTENABLE_NONE;
- timer_config.FaultLock = HRTIM_TIMFAULTLOCK_READWRITE;
- timer_config.DeadTimeInsertion = HRTIM_TIMDEADTIMEINSERTION_ENABLED;
- timer_config.DelayedProtectionMode = HRTIM_TIMER_A_B_C_DELAYEDPROTECTION_DISABLED;
- timer_config.UpdateTrigger= HRTIM_TIMUPDATETRIGGER_NONE;
- timer_config.ResetTrigger = HRTIM_TIMRESETTRIGGER_NONE;
- HAL_HRTIM_WaveformTimerConfig(&hhrtimA, HRTIM_TIMERINDEX_TIMER_A, &timer_config);
- /* Set compare registers for duty cycle on TA1 */
- compare_config.CompareValue = 46080000*Initial_Duty/Initial_Fre; /*duty cycle */
- HAL_HRTIM_WaveformCompareConfig(&hhrtimA,
- HRTIM_TIMERINDEX_TIMER_A,
- HRTIM_COMPAREUNIT_1,
- &compare_config);
- /* --------------------------------- */
- /* TA1 and TA2 waveforms description */
- /* --------------------------------- */
- output_config_TA.Polarity = HRTIM_OUTPUTPOLARITY_HIGH;
- output_config_TA.SetSource = HRTIM_OUTPUTSET_TIMPER;
- output_config_TA.ResetSource = HRTIM_OUTPUTRESET_TIMCMP1;
- output_config_TA.IdleMode = HRTIM_OUTPUTIDLEMODE_NONE;
- output_config_TA.IdleLevel = HRTIM_OUTPUTIDLELEVEL_INACTIVE;
- output_config_TA.FaultLevel = HRTIM_OUTPUTFAULTLEVEL_INACTIVE;
- output_config_TA.ChopperModeEnable = HRTIM_OUTPUTCHOPPERMODE_DISABLED;
- output_config_TA.BurstModeEntryDelayed = HRTIM_OUTPUTBURSTMODEENTRY_REGULAR;
- HAL_HRTIM_WaveformOutputConfig(&hhrtimA,
- HRTIM_TIMERINDEX_TIMER_A,
- HRTIM_OUTPUT_TA1,
- &output_config_TA);
- if(deadtime == TRUE)
- {
- HAL_HRTIM_WaveformOutputConfig(&hhrtimA,
- HRTIM_TIMERINDEX_TIMER_A,
- HRTIM_OUTPUT_TA2,
- &output_config_TA);
- }
- if(deadtime == TRUE)
- {
- HRTIM_DeadTimeCfgTypeDef HRTIM_TIM_DeadTimeConfig;
- /* Deadtime configuration for Timer A */
- HRTIM_TIM_DeadTimeConfig.FallingLock = HRTIM_TIMDEADTIME_FALLINGLOCK_WRITE;
- HRTIM_TIM_DeadTimeConfig.FallingSign = HRTIM_TIMDEADTIME_FALLINGSIGN_POSITIVE;
- HRTIM_TIM_DeadTimeConfig.FallingSignLock = HRTIM_TIMDEADTIME_FALLINGSIGNLOCK_READONLY;
- HRTIM_TIM_DeadTimeConfig.FallingValue = risingtime*4096/1000;
- HRTIM_TIM_DeadTimeConfig.Prescaler = HRTIM_TIMDEADTIME_PRESCALERRATIO_MUL8;
- HRTIM_TIM_DeadTimeConfig.RisingLock = HRTIM_TIMDEADTIME_RISINGLOCK_WRITE;
- HRTIM_TIM_DeadTimeConfig.RisingSign = HRTIM_TIMDEADTIME_RISINGSIGN_POSITIVE;
- HRTIM_TIM_DeadTimeConfig.RisingSignLock = HRTIM_TIMDEADTIME_RISINGSIGNLOCK_READONLY;
- HRTIM_TIM_DeadTimeConfig.RisingValue = fallingtime*4096/1000;
- HAL_HRTIM_DeadTimeConfig(&hhrtimA, HRTIM_TIMERINDEX_TIMER_A, &HRTIM_TIM_DeadTimeConfig);
- }
- if(adenable == TRUE)
- {
- HRTIM_ADCTriggerCfgTypeDef adc_trigger_config;
- /* ------------------------------------------- */
- /* ADC trigger intialization (with CMP4 event) */
- /* ------------------------------------------- */
- compare_config.AutoDelayedMode = HRTIM_AUTODELAYEDMODE_REGULAR;
- compare_config.AutoDelayedTimeout = 0;
- if(Initial_Duty >=50)
- compare_config.CompareValue = 46080000*Initial_Duty/Initial_Fre; /* Samples in middle of ON time */
- else
- compare_config.CompareValue = 23040000*(100+Initial_Duty)/Initial_Fre;
- HAL_HRTIM_WaveformCompareConfig(&hhrtimA,
- HRTIM_TIMERINDEX_TIMER_A,
- HRTIM_COMPAREUNIT_4,
- &compare_config);
- adc_trigger_config.Trigger = HRTIM_ADCTRIGGEREVENT24_TIMERA_CMP4;
- adc_trigger_config.UpdateSource = HRTIM_ADCTRIGGERUPDATE_TIMER_A;
- HAL_HRTIM_ADCTriggerConfig(&hhrtimA,
- HRTIM_ADCTRIGGER_2,
- &adc_trigger_config);
- }
- if(faultenable == TRUE)
- {
- HRTIM_FaultCfgTypeDef fault_config;
- /* ---------------------*/
- /* FAULT initialization */
- /* ---------------------*/
- fault_config.Filter = HRTIM_FAULTFILTER_NONE;
- fault_config.Lock = HRTIM_FAULTLOCK_READWRITE;
- fault_config.Polarity = HRTIM_FAULTPOLARITY_LOW;
- fault_config.Source = HRTIM_FAULTSOURCE_DIGITALINPUT;
- HAL_HRTIM_FaultConfig(&hhrtimA,
- HRTIM_FAULT_1,
- &fault_config);
- HAL_HRTIM_FaultModeCtl(&hhrtimA,
- HRTIM_FAULT_1,
- HRTIM_FAULTMODECTL_ENABLED);
- }
- if(deadtime == TRUE)
- {
- /* ---------------*/
- /* HRTIM start-up */
- /* ---------------*/
- /* Enable HRTIM's outputs TA1 and TA2 */
- /* Note: it is necessary to enable also GPIOs to have outputs functional */
- /* This must be done after HRTIM initialization */
- HAL_HRTIM_WaveformOutputStart(&hhrtimA, HRTIM_OUTPUT_TA1 | HRTIM_OUTPUT_TA2);
- }
- else
- HAL_HRTIM_WaveformOutputStart(&hhrtimA, HRTIM_OUTPUT_TA1);
- /* Start both HRTIM TIMER A, B and D */
- if(interrupt == TRUE)
- HAL_HRTIM_WaveformCounterStart_IT(&hhrtimA, HRTIM_TIMERID_TIMER_A);
- else
- HAL_HRTIM_WaveformCounterStart(&hhrtimA, HRTIM_TIMERID_TIMER_A);
- GPIO_InitTypeDef GPIO_InitStruct;
- /* Enable GPIOA clock for timer A outputs */
- __HAL_RCC_GPIOA_CLK_ENABLE();
- /* Configure HRTIM output: TA1 (PA8) */
- GPIO_InitStruct.Pin = GPIO_PIN_8;
- GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
- GPIO_InitStruct.Pull = GPIO_NOPULL;;
- GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;;
- GPIO_InitStruct.Alternate = GPIO_AF13_HRTIM1;
- HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
- if(deadtime == TRUE)
- {
- /* Configure HRTIM output: TA2 (PA9) */
- GPIO_InitStruct.Pin = GPIO_PIN_9;
- HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
- }
- }
复制代码
- /**
- * @brief This function calculates new duty order with PI.
- * @param None
- * @retval New duty order
- */
- int32_t PI_Buck(uint32_t RealVol,uint32_t SetVol,int32_t dec2hex(int32_t temp))
- {
- /* Compute PI for Buck Mode */
- /* Every time the PI order sets extreme values then CTMax or CTMin are managed */
- int32_t seterr, pid_out;
- int32_t error;
- error = ((int32_t ) RealVol - (int32_t) SetVol);
- error = dec2hex(error);
- seterr = (-Kp * error) / 200;
- Int_term_Buck = Int_term_Buck + ((-Ki * error) / 200);
- if (Int_term_Buck > SAT_LIMIT)
- {
- Int_term_Buck = SAT_LIMIT;
- }
- if (Int_term_Buck < -(SAT_LIMIT))
- {
- Int_term_Buck = -(SAT_LIMIT);
- }
- pid_out = seterr + Int_term_Buck;
- pid_out += BUCK_PWM_PERIOD / 2;
- if (pid_out >= MAX_DUTY_A)
- {
- pid_out = MAX_DUTY_A;
- CTMax++;
- }
- else
- {
- if (CTMax != 0)
- {
- CTMax--;
- }
- }
- if (pid_out <= MIN_DUTY_A)
- {
- pid_out = MIN_DUTY_A;
- CTMin++;
- }
- else
- {
- if (CTMin != 0)
- {
- CTMin--;
- }
- }
- return pid_out;
- }
[color=rgb(51, 102, 153) !important]
[color=rgb(51, 102, 153) !important]
[color=rgb(51, 102, 153) !important]
[color=rgb(51, 102, 153) !important]
[color=rgb(51, 102, 153) !important]
[color=rgb(51, 102, 153) !important]
[color=rgb(51, 102, 153) !important]
[color=rgb(51, 102, 153) !important]
[color=rgb(51, 102, 153) !important]
|
|


 发表于 2019-11-7 16:30:22
发表于 2019-11-7 16:30:22


 /2
/2 

