|
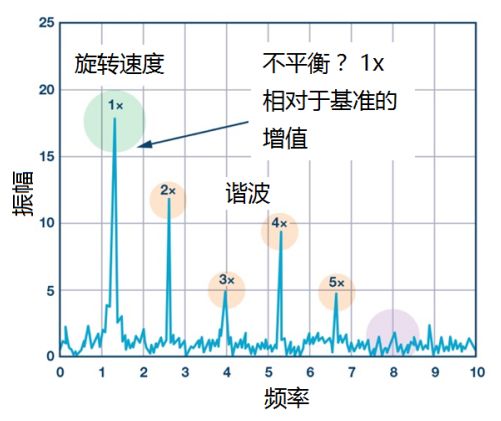
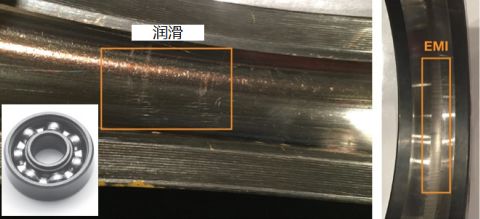
在设计监控工业设备和应用的机械操作时, 选择合适的振动传感器是不可或缺环节的。本文分析了工业生产中因振动而引发的故障类型及其成因,包括不平衡、错位、滚动轴承缺陷和轮齿故障,在此基础上总结出监测这些振动所需的振动传感器及其系统参数和规格要求。此外,还特别介绍了高阶的加速计运动传感器在振动感测中的应用,以实现具有高分析能力的解决方案及系统。 前言 现今半导体技术的能力与进步已推进至感知(sense)、测量(measure)、理解(interpret)和分析数据(data-analyze)的工业应用,尤其是基于条件监视的解决方案。 以MEMS技术为基础的新一代传感器应用于诊断和预防时,基于应用程序的先进算法,可扩展至测量不同监控设备,有效延长设备正常运行时间,提高工业过程的质量。为了实现这些新功能并让状态监控 (Condition-Monitoring) 行之有效,新的解决方案必须准确、可靠且稳健,因此,实时监控 (real-time monitoring) 除了对基本的范围检测之外,还要扩展到潜在的设备故障及防范预测,以及提供可行性及实时的信息反馈。 “振动”是机器发生事故后一个需要注意的关键因素,因此了解“振动”有利于更有效地实现高级的诊断和预测,最终实现高级的振动监测解决方案。 本文通过分析工业自动化应用中的主要机器故障类型——包括不平衡、错位、齿轮故障和滚动轴承缺陷——进而了解振动传感器的相关性能与参数,以因应故障感测之需,同时协助工程师顺利完成在系统开发及选料上的工作。 不平衡 “不平衡(Imbalance)”是指因负载分布不均匀导致的质量中心偏离旋转中心。系统失衡可归因于不正确的安装,例如耦合偏心率、系统设计错误、组件故障等,甚至碎屑或其他污染物的积聚,或灰尘和油脂积聚。 虽然整体系统振动的增加可能会由以上任何“不平衡”因素造成,但是我们可通过在频域 (frequency domain)中进行分析,诊断出振动增加的根本原因。“不平衡”的系统以系统的旋转速度 ( 本文中称之为1x) 产生信号,其幅度与旋转速度的平方成正比,即F = m×w2。 「1x」成分通常总是出现在频域中,因此可通过测量1x分量和谐波的幅度来确定系统不平衡。如果1x的幅度高于基线测量值,并且谐波远小于1x,则表示可能正发生‘不平衡’的情况。下图1是“不平衡”发生时频域分布的典型范例。 图1:基于旋转速度,或以1x表达的频率的振幅增加,即表示正在发生“不平衡”的情况 (图片来源:ADI) 由此我们可以推断监测“不平衡”系统时,对所需振动传感器的要求包括: 1) 需要有低噪声特性以减少传感器影响,并能够检测由不平衡系统产生的小信号。这对于传感器、信号调理和采样平台非常重要。 2) 需要采样系统有足够的分辨率来提取信号(尤其是基线信号)以检测这些小的不平衡。 3) 带宽是捕获旋转速率以外的足够信息所必需的,这有助于提高诊断的准确性和可信度。1x谐波可能会受到其他系统故障(例如未对准或机械松动)的影响,因此对转速或1x频率的谐波进行分析可以帮助区别系统噪声和其他潜在故障。在旋转机器上,基本转速可以远低于10rpm,这意味着传感器的低频响应对于捕获基本转速至关重要。 错位 与原先设计要处理的组件相比,“错位(Misalignment)”会令组件在更高的压力或负载下导致系统或组件过早产生故障。下图2中列出了常见的“角错位 (angular misalignment)”及“平行错位 (parallel misalignment)”。 图2:理想对位、角错位 (angular misalignment)、平行错位 (parallel misalignment) 状态的比较 (图片来源:ADI) “错位”的发生通常可在系统旋转速度的二次谐波 (文中称为2x) 中找出端倪。一般2x成分并不出现在频率响应中(或存在于较低幅度),但是当它出现时,或存在高幅度时,即表示“错位”可能已经正在发生。另外,利用2x与1x之间的比较及其幅度也可以推断发生“错位”的类型、位置以及方向信息。图3显示了与潜在“错位”故障相关的信号。 图3:2x谐波增加,再加上高谐波增加 (图片来源:ADI) 感测“错位”系统时应考虑的振动传感器的要求包括: 1) 在不同机器类型、系统和过程要求中,需要检测较细微的未对准或在机器可容忍的公差中感测故障,低噪声和足够的分辨率是需考虑的因素之一。 2) 由于1倍谐波会受到其他故障影响,系统可能需要捕获及分析谐波1×频率及以上的高倍谐波,这有助于区别其他故障。为实现系统高质的准确性和可信度,拥有足够的诊断频率带宽 (Bandwidth)是需要考虑的。 3) 多向性信息的接收可以提高诊断的准确性并深入了解未对准误差的类型及其偏差的方向,通过测量机器上不同点处的振动并确定相位测量值或整个系统中的差异,可以洞悉失准是角度失调、平行还是两种失调类型的组合。 滚动轴承缺陷 滚动轴承(Rolling Element Bearing Defects)的缺陷通常是由机械引起的应力或润滑问题造成的,这些缺陷会在轴承的机械部件内产生小裂纹或缺陷,从而导致振动增加。图4提供了一些滚动轴承的示例,并描述了可能发生的缺陷。 图4:滚动轴承 (图中)及其润滑和放电电流缺陷的示例。(图片来源:ADI) 滚动轴承几乎在所有旋转机械中都可以找到,从大型涡轮机到较慢的旋转电机,从相对简单的风扇到高速打摩主轴,全依赖滚动轴承的运作。轴承缺陷可能是润滑污染、安装不当、高频放电电流或系统负载的损耗。虽然诊断轴承故障的技术很多,但是可以根据轴承设计背后的物理原理,例如轴承的几何形状、旋转速度和缺陷类型来计算每个轴承的缺陷频率,再从频域分布图中分析从而完成故障诊断。 图5 :应用包络信息( Envelope Signal)检测技术从宽带振动数据中获取早期轴承缺陷特征。(图片来源:ADI) 诊断滚动轴承故障所需振动传感器规格要求包括: 1) 低噪声和足够的分辨率对于检测早期轴承缺陷至关重要。通常,这些缺陷特征在缺陷发作期间幅度较小。由于设计公差,轴承固有的机械滑动会通过在轴承的频率响应中将振幅信息分布到多个空位中来进一步降低振动的幅度,因此需要较低的噪声才能更早地检测到信号。 2) 带宽对于早期检测轴承缺陷至关重要。每次在旋转过程中击中缺陷都会产生一个包含高频成分的脉冲。对于这些早期故障,需要监视轴承缺陷频率的谐波,而不是转速。由于轴承缺陷频率与转速之间的关系,这些早期信号可能出现在几千赫兹的范围内,并远远超出了10kHz至20kHz的范围。即使对于低速设备,轴承缺陷的固有特性也需要更宽的频率范围。用于早期检测的带宽,以避免受到影响较低频段的系统谐振和系统噪声的影响。 3) 动态范围对于轴承缺陷监测也很重要,因为系统负载和缺陷会影响系统所经历的振动。增加的载荷导致作用在轴承和缺陷上的力增加。轴承缺陷还会产生激发结构共振的脉冲,从而放大系统和传感器所经历的振动。随着机器在停止/启动条件或正常运行期间速度的上升和下降,不断变化的速度为系统共振提供了潜在的机会,传感器饱和会导致信息丢失、错误诊断,并且在某些技术的情况下会损坏传感器元件。 齿轮故障 齿轮故障(Gear Defects)通常是由于疲劳、剥落或点蚀而出现齿根裂纹或齿表面金属脱落。它们可能是由于磨损、超负荷、润滑不良、反冲以及偶尔的不当安装或制造缺陷而引起的。 齿轮是许多工业应用中动力传输的主要元素,承受很大的压力和负荷。它们的正常状况对于整个机械系统的正常运行至关重要。由于在故障附近安装振动传感器很困难,并且由于系统内存在由多种机械撞击而产生的背景噪声,因此很难检测出齿轮故障。在更复杂的变速箱系统中尤其如此,在变速箱系统中,可能存在多个旋转频率、齿轮比和啮合频率。因此,在齿轮故障的检测中可能需要其他测验方法作互补,包括声发射分析 (acoustic emissions analysis)、电流信号分析 (current signature analysis) 和油渣分析 (oil debris analysis)。 在振动分析方面,变速箱外壳是加速度计的典型安装位置,主要的振动模式是在轴向方向上。健全的齿轮会产生振动信号,称为齿轮啮合振频 (gear mesh frequency),这等于轴频率与齿轮齿数的乘积,通常还存在一些与制造或组装公差有关而产生的振动。在图6中以齿轮为例进行了说明。当发生局部故障(如牙齿裂痕)时,每次旋转中的振动信号将包括系统在相对较低的能量水平下对短时撞击的机械响应。这种情况下通常是低幅度的宽带信号,以及非周期性及非平稳的信号。 图6:在健全齿轮转动中,当轴转速约1000rpm、齿轮转速约290rpm、轮齿数为24,发生轮轴“弯曲”故障情况下,频谱分析图的状态 (图片来源:ADI) 诊断齿轮故障所需振动传感器规格要求包括: 1) 带宽在齿轮故障检测中非常关键,因为齿轮齿的数量改变在频域分析中以倍数值增加,所以即使对于速度相对较低的系统,所需的检测频率范围也会迅速提高到多个kHz。 2) 由于多种原因,分辨率和低噪声至关重要。将振动传感器安装在特定故障区域附近的难度很大,这意味着机械系统对振动信号的衰减可能会更高,这使得能够检测低能量信号至关重要。还要考虑到,由于齿轮问题引发的信号不一定是静态周期(static periodic),因此不能完全依赖利用传统的快速傅立叶变换(Fast Fourier Transform, FFT)技术,从高本底噪声(noise floor)的环境中提取低振幅信号,所以要求传感器本身的本底噪声必须很低,在变速箱环境中尤其如此,在变速箱环境中,来自变速箱不同元件的多个振动信号混合在一起。除了这些考虑因素之外,早期检测的重要性不仅出于零件保护的原因,而且出于信号源本身在故障初期较易发现,例如与后期的多齿断裂损坏相比,初期单齿断裂故障的情况下的振动严重性可能更高,这意味着在早期阶段检测可能相对容易。 传感器的选料 下列表1 概括了以上四种系统故障类型监测对应的所需传感器的要求。 表1:不同故障下,传感器参数的要求 (图片来源:ADI) 工程师可根据以上表1,选择合适的振动传感器。使用参数恰当的振动传感器,加上正确使用分析工具,以确定机械问题的具体原因及位置,将会协助工程师加快维修速度并降低成本。振动传感器可以用来测量和分析位移,线速度和加速度。虽然规格书内的参数一般直接与应用相关或是通过数学运算得知,但是Digi-Key已列出了一些传感器的重要参数,可以帮助工程师省去这一费时的步骤。 图7 :振动传感器重要参数筛选列表 例如 TE Connectivity Measurement Specialties 公司的 LDT 系列,拥有高灵敏度 (50 – 200 mV/g),输出电压摆幅可以直接输入FET或CMOS,将部件灵活运用成“开关”。 有部份工程师会选择“加速计运动传感器 ”作振动感测。此类传感器可以将微小的振动感测如“加速度信号”,之后放大以进行加速度测量,或者在传感器内将其转换为速度或位移信号。如今,大多数用于振动监测的压电传感器都包含内部放大器。运算放大器可用于将这些传感器连接至分立的或微控制器上的A/D转换器。例如Analog Devices 公司的ADXL1005 系列,可为工业监控应用提供高带宽及高噪声密度的解决方案。使用ADAQ7980作模数转换,用于测量0kHz至10kHz的机械振动,请参考图8的示例。 图8 :ADXL1005 应用电路图 (图片来源:ADI) 总结 因振动而引发的故障类型众多,四类常见故障分别是不平衡、错位、滚动轴承缺陷和轮齿故障,了解了这些故障产生振动的原理,就能了解所需的振动传感器及其系统参数、要求,以便进行检测和诊断。所以在设计监控工业设备和应用的机械操作时, 选择合适的振动传感器是不可或缺环节的。除了传统的“振动传感器”,高阶的“加速计运动传感器 ”也可以用于振动感测,实现具有高分析能力的解决方案及系统。 更多有关监测的技術资料请参考digikey.cn内的文库: •ADI 传感器技术产品页 • 振动传感器的应用和解决方案(英文版) • ADI技術文章 - 传感器性能如何支持状态监控解决方案 • 为工业应用中基于状态的监测构建 MEMS 振动传感器系统 • 使用库伦计监测锂电池健康度! 内有详情! •想搞BLDC电机控制,就必须要懂的角度传感器
| 


 发表于 2020-2-25 08:54:07
发表于 2020-2-25 08:54:07